上海天文台牵头的VLBI测轨分系统成功为嫦娥六号任务精确导航保驾护航
2024年6月25日14时07分,嫦娥六号返回器准确着陆于内蒙古四子王旗预定区域,工作正常,标志着探月工程嫦娥六号任务取得圆满成功,实现世界首次月球背面采样返回。由中国科学院上海天文台(以下简称上海天文台)牵头的VLBI测轨分系统自2024年3月20日成功发射鹊桥二号中继星至2024年6月25日嫦娥六号成功返回,全程“保驾护航”,圆满完成了本次测定轨任务。
天文观测长期积累应用于国家探月工程
甚长基线干涉测量(VLBI,Very Long Baseline Interferometry)技术,自20世纪60年代问世以来,是空间分辨率最高的高精度天文观测技术,其原理是:用两台或更多台不同地方的望远镜在同一时间和同样频率下观测同一个具有射电辐射的天体,采用各台站独立本振和数据记录,经过对观测数据的综合处理,“组合”出一台虚拟巨型望远镜。它的最大口径相当于望远镜之间的最大间距,两台望远镜之间距离越远,等效口径就越大,分辨率就越高。
上世纪70年代,上海天文台的叶叔华院士提出发展我国的VLBI网,组建研究团队开展技术研发和望远镜建造,分别于上世纪80年代和90年代完成了上海佘山25米望远镜和乌鲁木齐南山25口径射电望远镜及台站的建设。2004年,我国绕月探测工程(即探月工程一期)正式立项,上海天文台主动提出将天文观测领域的VLBI技术应用于嫦娥一号探测器的高精度VLBI轨道测量与确定,得到了探月工程总体的认可。自此,由上海天文台牵头的VLBI测轨分系统将实时VLBI技术成功应用于月球探测器的测定轨、定位,构成了我国现有的“测距测速+VLBI测角”深空探测高精度测定轨体制,成为了我国探月工程测控系统的重要组成部分。
将VLBI技术应用于对深空探测器的轨道测定时,相距遥远的多个VLBI观测站同时交替跟踪观测同一个目标(参考射电源或探测器),各VLBI观测站的数据传至数据中心,经复杂计算得到信号到达各测站的时间差(时延)及其变化率(时延率),可进行精密的空间角度测量,综合利用VLBI时延和时延率与测距测速数据,便可对探测器进行高精度定轨定位。同时,当两个临近的探测器位于望远镜同一波束内,构成同波束VLBI(SBI,Same Beam Interferometry)观测条件时,两者系统误差几乎相同,能提供比常规差分VLBI更高的相对测量精度。
目前,VLBI测轨分系统目前包括“四站一中心”,即上海天马站(嫦娥三号前使用上海佘山站)、北京密云站、新疆南山站、云南昆明站与上海VLBI数据处理中心。经过20多年的持续攻关,上海天文台VLBI团队突破多项关键核心技术,为探月一期至三期“绕、落、回”任务六战六捷和我国首次火星探测“天问一号”任务的圆满完成做出不可替代的重要贡献,也是中国科学院长期的基础研究积累在国家战略领域得到应用的典型案例。
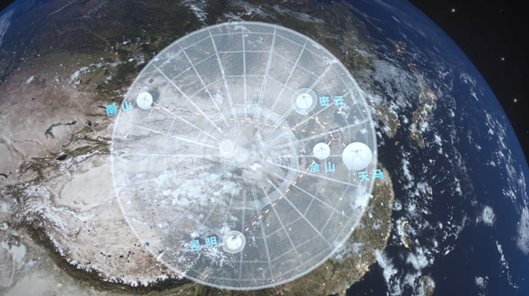
“四站一中心”的中国VLBI观测网
仅用一个VLBI网完成了包括鹊桥二号与嫦娥六号在内的多个探测器的测定轨工作
2024年3月20日鹊桥二号发射拉开了探月工程四期的序幕。到6月25日嫦娥六号月背采样返回,VLBI测轨分系统依旧一路相随,基于现有“四站一中心”,采用分时模式支持了多任务、多目标测定轨,圆满完成了包括鹊桥二号中继星和嫦娥六号在内的多个月球探测器测定轨工作,并将支持首次月球轨道空间VLBI试验。
中国探月工程在完成“绕、落、回”三步走后,又迎来了探月工程四期重磅开篇——嫦娥六号任务,以着陆月球背面南极-艾特肯盆地内开展采样返回和探测为目标,采用与月球自转方向相反的逆行轨道设计与控制技术,辅以鹊桥二号中继星支持月背测控通信,实现国际首次月球背面采样返回任务。
在嫦娥六号任务中,VLBI测轨分系统面临着不同以往的难点和挑战:地面观测站在近月制动、月地入射过程中对探测器的位置部分不可见,在动力下降段、月面工作段、月面上升段则均不可见,需要鹊桥二号中继星支持。相较于“嫦娥五号”任务,对定时定点着陆要求更高,且推进剂余量更少;在嫦娥六号测定轨任务执行时,需同时确保鹊桥二号中继星高精度测定轨与轨道控制;由于嫦娥六号任务采用新型的逆行轨道,环月飞行时间大大增加,实时任务周期更长,由23天延长到53天,对VLBI设备的稳定性和人员持续工作都是很大的考验。
对此,VLBI测轨分系统精心组织、改造挖潜、周密部署,以嫦娥五号测定轨设施为基础,通过软硬件优化与维护,将原有的单任务系统升级为初步的多任务系统,完成了任务前对四个观测站和VLBI中心巡检,确认了设备状态、落实了人员队伍、编制了应急预案等。
为解决在嫦娥六号任务中地面观测站在月背盲区无法直接测量通信的问题,我国于2024年3月首先发射了我国第二颗新一代月球中继通信卫星——鹊桥二号。VLBI测轨分系统完成了对鹊桥二号中继星的测量与定轨定位和轨道预报,同时兼顾两个天都试验星和在轨的鹊桥一号等多个探测器的测轨工作,数据实时性及测量精度都优于任务要求。
嫦娥六号实施过程中,VLBI测轨分系统主要承担全任务11个飞行段中共9个飞行段的实时测定轨任务。根据各飞行段飞控需求,VLBI测轨分系统依次对地月转移与近月制动飞行的四器组合体(轨道器、返回器、着陆器、上升器)、环月飞行及分离后的轨返组合体和着上组合体、环月等待的轨返组合体和月面起飞的上升器进行实时测量。与此同时,VLBI测轨分系统还承担鹊桥二号中继星的实时测定轨、鹊桥一号中继星的长管观测任务等多个探测器的测定轨工作,有效支持了对嫦娥六号月球背面工作段的测控通信。
VLBI测轨分系统在面对嫦娥六号这一我国复杂度最高、难度挑战最大的月球探测任务时,解决了更长周期运行、更高可靠性约束下的多任务并行与多目标快速切换观测、S和X多频段多模式测量、多目标高精度定轨等诸多技术难点,通过双目标观测的快速切换,确保了嫦娥六号与中继星之间在50分钟内完成两器测定轨,后续对轨道器和上升器切换时间更短。
在数据处理方面,VLBI测轨分系统从观测站系统、实时通信系统、实时数据处理系统、定轨定位计算系统等方面进行了综合提升,使整个系统具备了对逆行轨道飞行的嫦娥六号探测器开展高动态、高实时和高精度的测量能力,具备多任务多目标快速分时测量能力。VLBI测定轨团队自嫦娥五号任务开始,通过提升VLBI观测站数据接收灵敏度和改进信号传输稳定性,自主研制了数字化16通道数据采集记录传输一体化设备,开发部署高可靠4测站实时同步eVLBI数据传输分发系统,研制动态同波束双目标干涉测量数据实时处理软件系统,改进信号传播介质误差修正模型,提升月球与深空探测器高精度定轨定位软件等,使得对探测器测定轨能力和精度得到进一步地提升。
VLBI测轨分系统在测轨资源紧张的条件下,科学合理安排跟踪弧段,努力做到跟踪完整、测定轨准确,在只使用一个VLBI网的条件下,分时支持多任务、多目标测定轨,确保了嫦娥六号成功采样返回,后续将支持开展中继星搭载的地月轨道空间VLBI试验。
上海天文台正在建设西藏日喀则和吉林长白山两个40米望远镜,建成后中国VLBI网将从目前“四站一中心”的单网扩展为“六站一中心”两个子网,将更好地满足地月空间VLBI试验、嫦娥七号需求,为后续多个月球与行星科学探测任务保驾护航。

2024年6月25日嫦娥六号成功返回后,VLBI运行团队部分科研人员合影
附件下载:


